MIT Chancellor Barnhart thanks Course 6’s SuperUROP students for their research and innovation contributions; praises SuperUROP’s quintessential MITness
As the 2015 SuperUROP graduates flowed into the year-end certificates presentation event on May 7 at the Media Lab Skyline Room, the class of over 90 students looked ready for celebrating — just as they had embarked this past year on their intense research collaboration with their faculty advisor and his/her research group — supported as research scholars by the generous backing of industry and private sponsors.
Senior Ava Soleimany says she has gained a “much nuanced understanding of what exactly research involves.” With an interest in the computational aspects of synthetic biology and its medical applications, Soleimany applied to be a SuperUROP in spring 2014 in Prof. Timothy Lu’s Synthetic Biology Group. She was able to extend her existing UROP to a SuperUROP. She notes “It allowed me to hit the ground running in the fall while many of my peers were still sorting out the details of their projects.” She intends to continue with work/research at the intersection of EECS and Biology, but learned that she wants to reach beyond synthetic biology. This summer she will do a research internship at Seven Bridges Genomics.
Following their group photo session on the deck of the Media Lab Skyline Room, the SuperUROP graduates gathered to hear MIT Chancellor Cynthia Barnhart warmly congratulate them. “I’d like you to know that your contributions to the research enterprise and the innovation ecosystem at MIT are recognized, are an important element and are deeply appreciated,” she told them.
Barnhart cited several SuperUROP graduates who had reflected on their experience. The words offered by 2013-14 SuperUROP student Ishwarya Ananthabhotla in the 2014-15 brochure resonated with her — and most likely with many of those in the room. “Being a SuperUROP showed me something that I think is easy to forget at MIT. Effort, patience, hard work, and persistence—often over a long period of time, such as an entire year— will leave you with a rewarding, successful learning experience.”
Junior Neerja Aggarwal, energized by her year of research under Professor Rajeev Ram, is looking forward to working as a “print process summer intern at FormLabs in Somerville, MA, with the goal of continuing her research when she returns to MIT working towards her MEng and potentially her PhD. Aggarwal particularly valued the weekly meetings her SuperUROP advisor provided. “We met every week and he offered guidance not only on my research project, but also on how to approach problems and thinking about my future.”
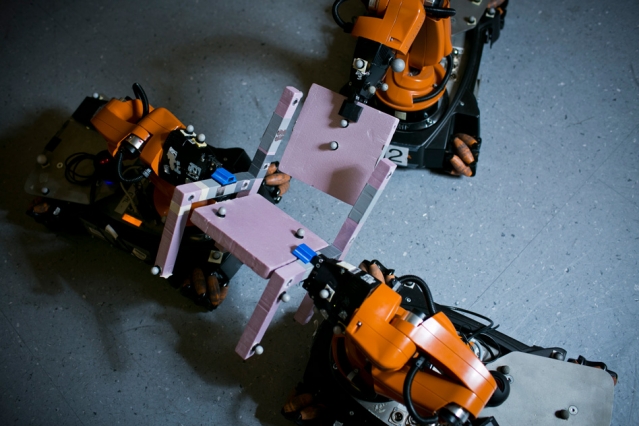
The SuperUROP includes a year-long class (6.UAR — Undergraduate Advanced Research) devoted to examining research in depth – from picking a topic to effective communications about a research project. The final classes included 90-second presentations from each student about his/her SuperUROP research topic. This year yielded research in the broad areas of robotics, circuits and devices, bioEECS, artificial intelligence, machine learning, system optimization, algorithms and image processing. Some projects built on previous SuperUROPs demonstrating the collaborative nature of the EECS research community. Many projects had working prototypes and simulations.
SuperUROP creator and director Anantha Chandrakasan was thrilled with the way the students rose to the challenges of the SuperUROP experience. As instructor of 6.UAR, with MIT’s Dean for Undergraduate Education Dennis Freeman, Chandrakasan noted about the presentations and the overall milestones, “The level was truly outstanding — and accessible by a broad audience. As with the previous class, we look forward to seeing many of these projects in premiere conferences and journals as well as watching our students move on to top PhD programs and industry positions.”
Seniors Erik Johnson and Ahmet Musabeyoglu, two Duke Energy scholars working under Prof. David Perreault, traveled to India to gather end-user input for their projects on rural electrification. With the goal of developing a scalable DC microgrid architecture with cost-effective, smart power converters, the two took their system prototype to Jarkhand India, successfully implementing their system in two different villages. “Seeing the happiness in the eyes of people who met electricity for the first time in their life was the most satisfactory result of my whole SuperUROP research,” said Musabeyoglu. The two plan to return to set up a second revision this summer.
The challenges that each SuperUROP encounters during her or his deep dive into research are not trivial and often deeply impactful. Working closely with graduate student supervisor Nathaniel Rouquet in the Lu Lab, Soleimany says that all of their experiments were failing during the fall. “Navigating that situation was a great learning experience,” she says, including “…how to persevere, motivate yourself, take chances, go out on a limb for a potential solution….” When their experiments started to work she notes, “it was even more gratifying/exciting, given all that we had dealt with.” That’s a reality of research,” she notes. “I would not have been able to understand that without SuperUROP.” She plans to finish up her part of this research, which will be published in a professional journal.
Junior Kaustav Gopinathan worked with Professors George Verghese and Collin Stultz on a project that explored and evaluated electrical techniques to help detect and quantify anemia, a disorder faced by almost 25% of the world’s population— significant because the populations carrying the highest burden of anemia often have the least access to hospital technologies. “I plan to extend the SuperUROP project further in the coming semesters,” says Gopinathan. “Looking ahead, I want to pursue an MD-PhD, and this SuperUROP project in BioEECS is exactly the kind of research I want to work on in the future.”
Chancellor Barnhart said in her remarks on May 7: “SuperUROP in its design is so quintessentially MIT, particularly because it builds on MIT’s tradition of mens et manus, and it is aligned with the Institute’s priorities of discovery, innovation, and making the world a better place.” She also noted the attractiveness of the SuperUROP to other departments and beyond, suggesting the possibility that other universities across the globe might adopt this model—just as they did with the original 1969 UROP program. At MIT, the AeroAstro Department will begin a SuperUROP in the upcoming 2016 academic year.
Professor Jaime Peraire, AeroAstro Department Head, is excited about piloting the program in his department. “We had anticipated 5-7 students signing up in the first year. When I was told 21 students had submitted proposals, with 12 AeroAstro faculty and research scientists agreeing to supervise their efforts, I was thrilled. Our students are excited to be working so closely with faculty and our industrial partners. The fact that we have been able to leverage so much support from industry in our very first year is tremendous. We’re eager to see what the future brings.”
As Barnhart posed to the SuperUROPs, faculty supervisors and SuperUROP staff, “What more could we ask for?”
News Image:


























































 Enabling neighbors in remote areas of the world that lack electricity to inexpensively buy power from a local solar panel owner, essentially creating their own microgrid, may sound utopian, but it is being developed by EECS faculty members
Enabling neighbors in remote areas of the world that lack electricity to inexpensively buy power from a local solar panel owner, essentially creating their own microgrid, may sound utopian, but it is being developed by EECS faculty members 
 Luis Fernando Velasquez-Garcia
Luis Fernando Velasquez-Garcia